IEA_robotics - Mechatronic design of a small-factor mobile robot for multi-agent robotic systems.
Table of Contents
Source files
Schematic, PCB and CAD design files, GitHub repository
Description
Mechatronic design of a small-factor mobile robot for multi-agent robotic systems.
IEA_uRobotics_v1 characteristics
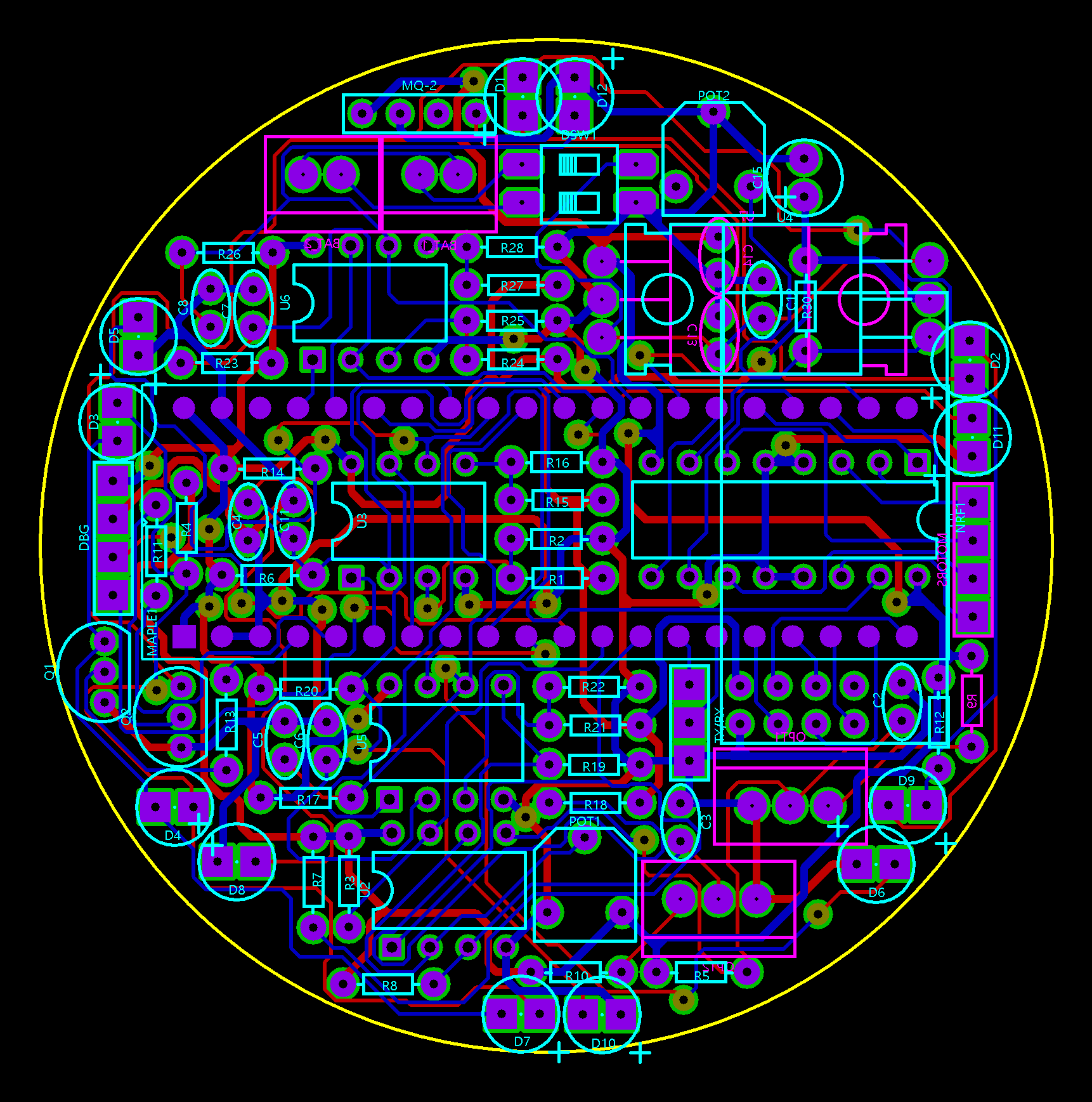
- Schematic and PCB designs made in Proteus.
- +5V/3.3V voltage regulator.
- Maple mini (STM32).
- NRF24L01+ transceiver.
- L293D motor driver.
- Two motor enconders.
- Six Infrared (IR) proximity sensors.
- Designed with DIP components.
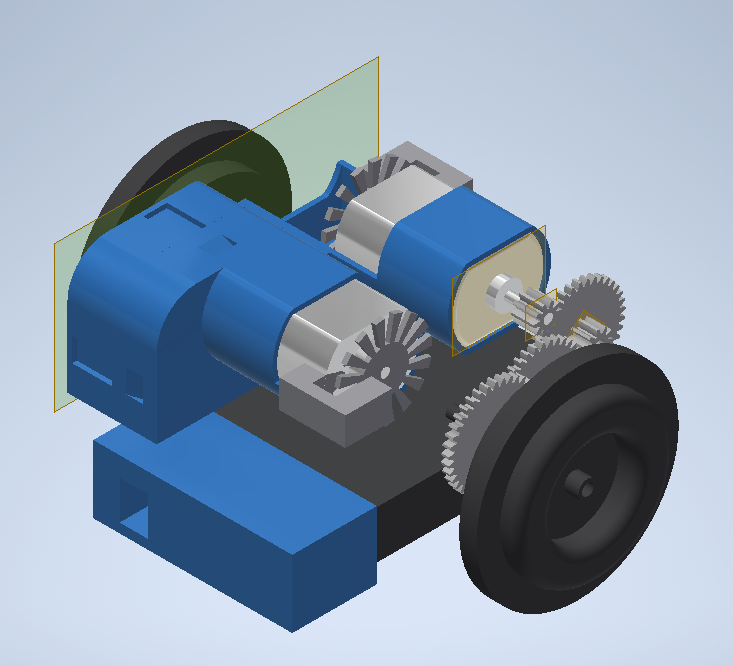
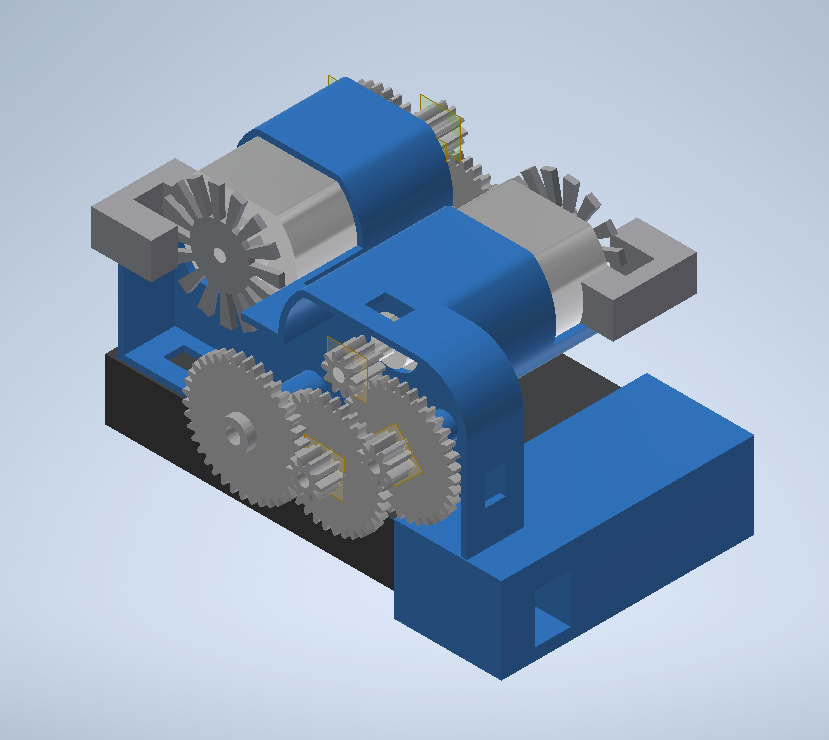
- Mechanical design made in Autodesk Inventor.
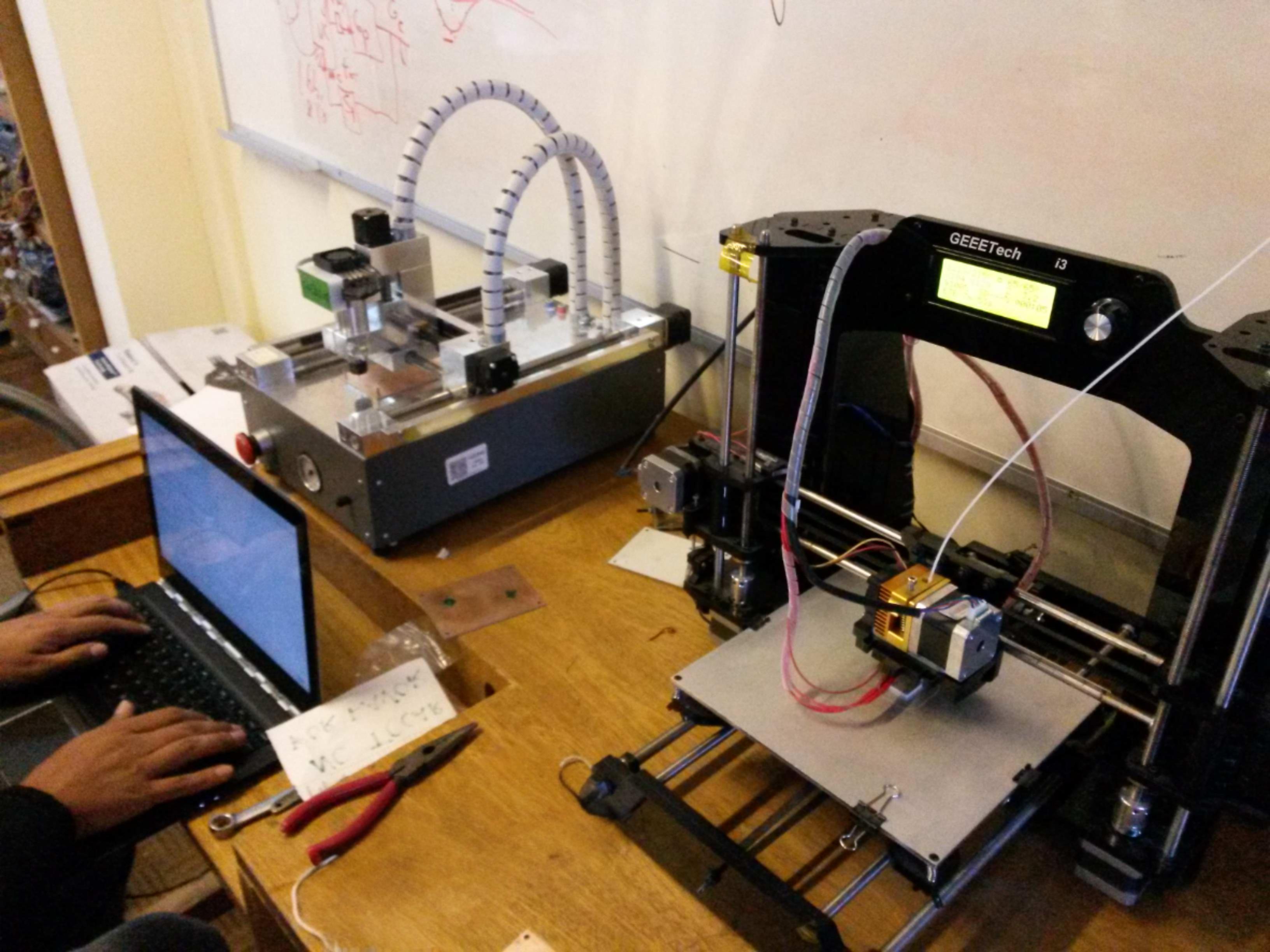
- 3D printer parts made with Geetech Prusa i3x.
Schematic
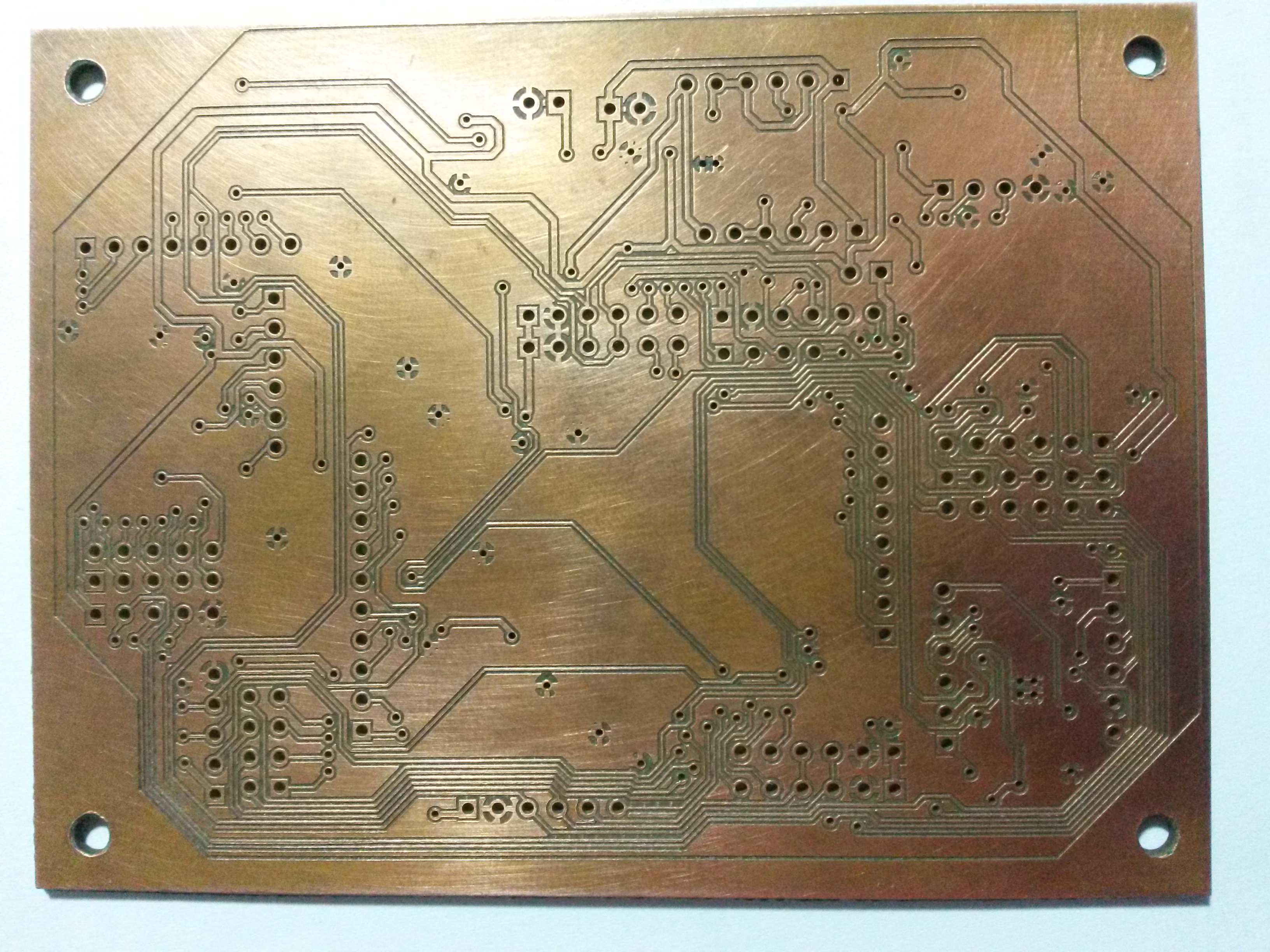
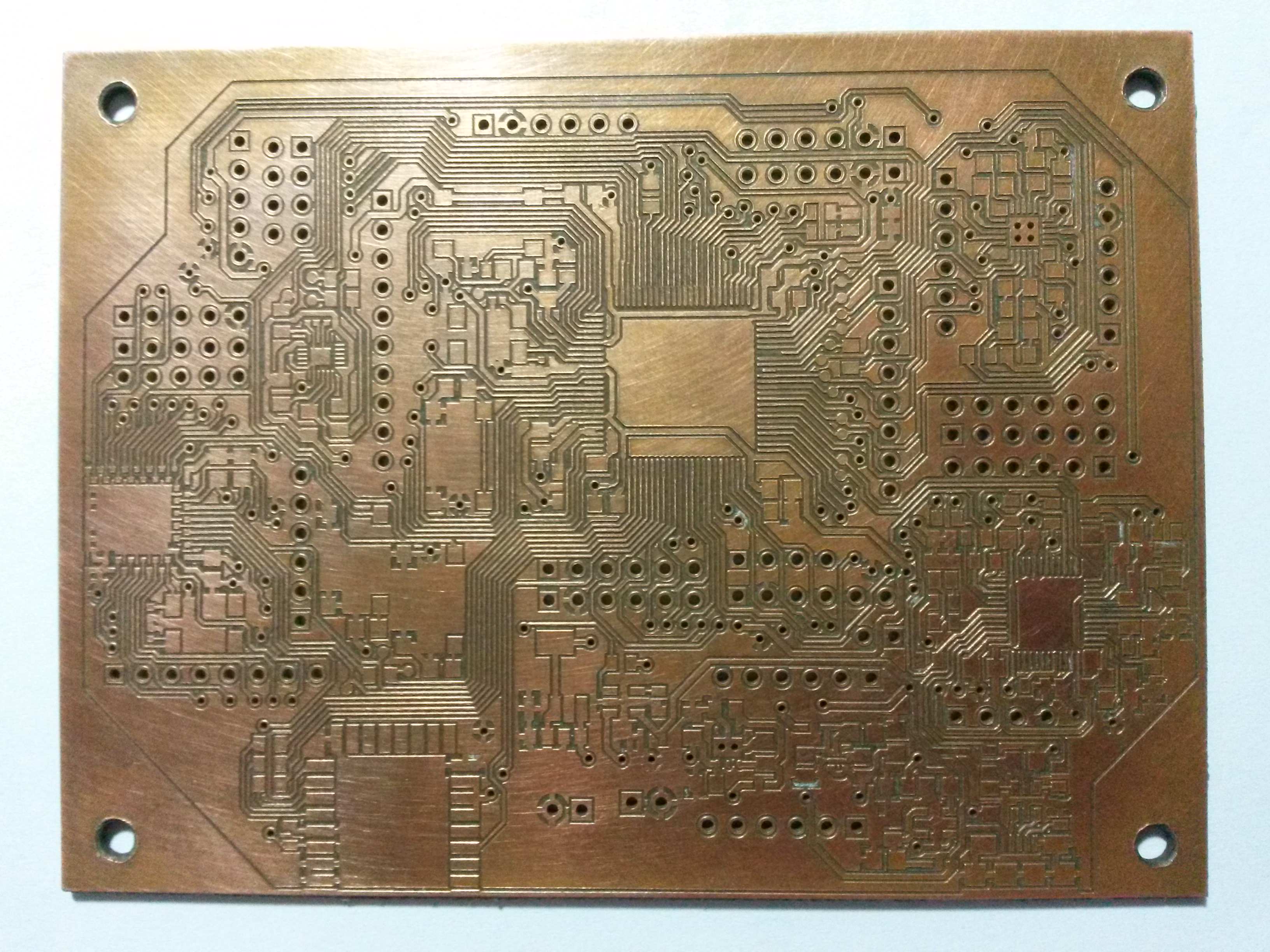
PCB
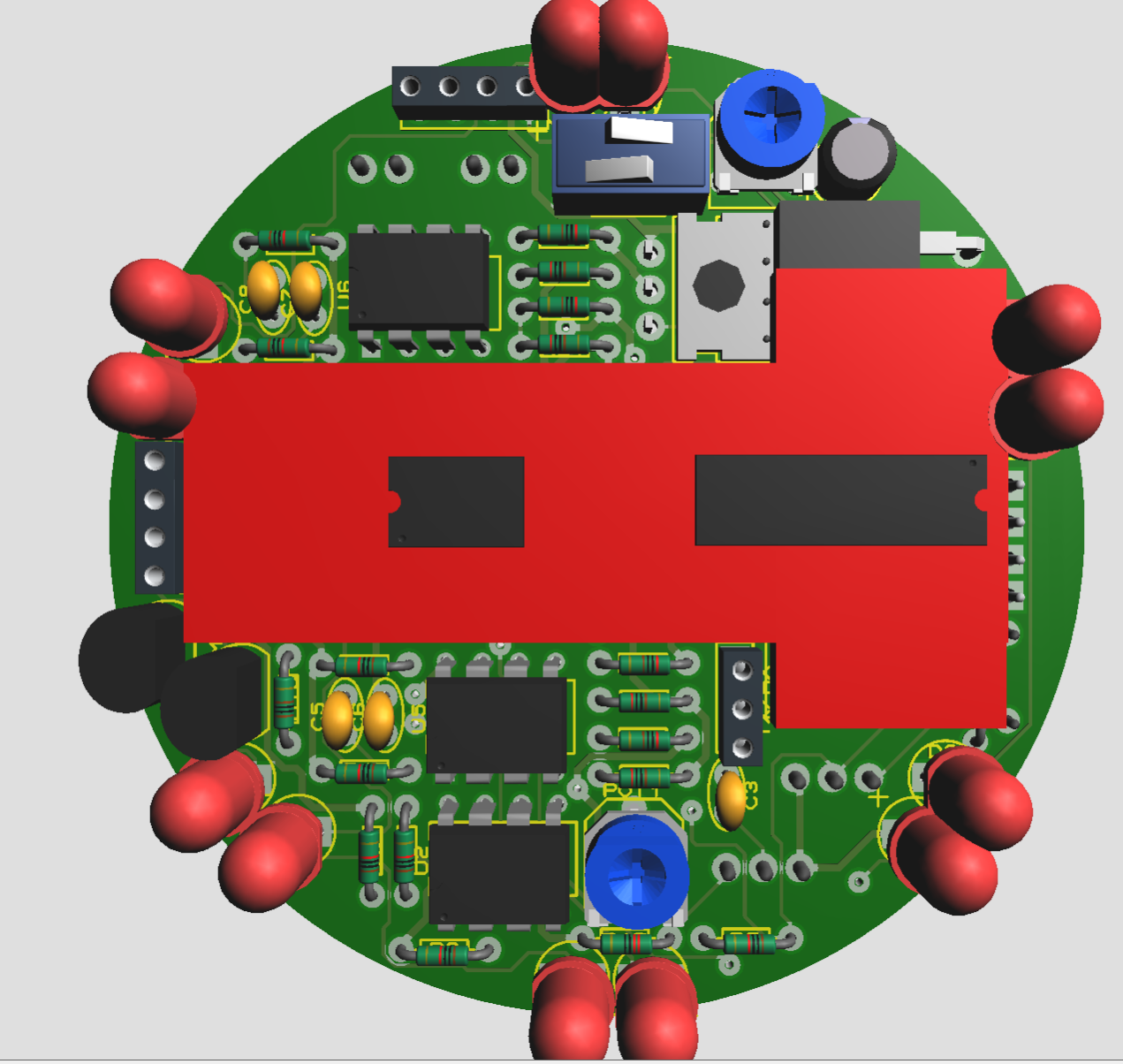
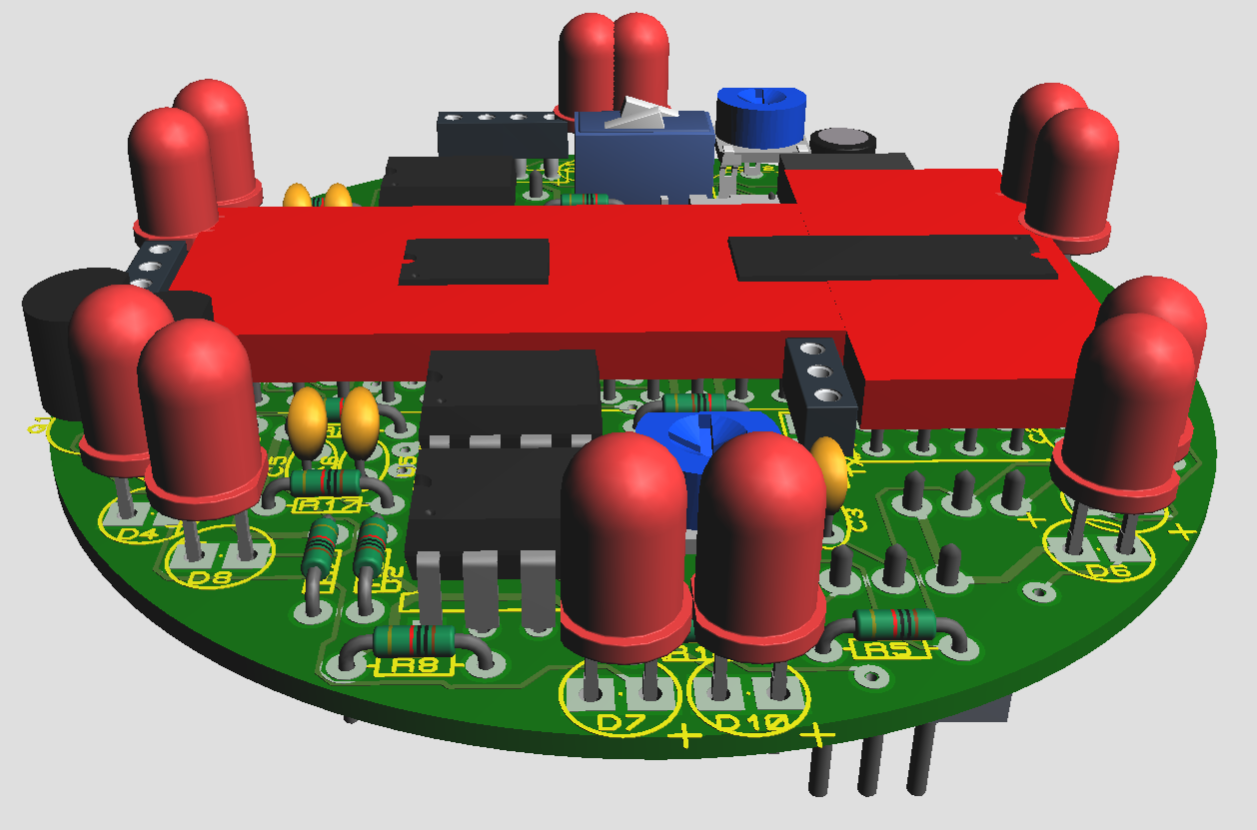
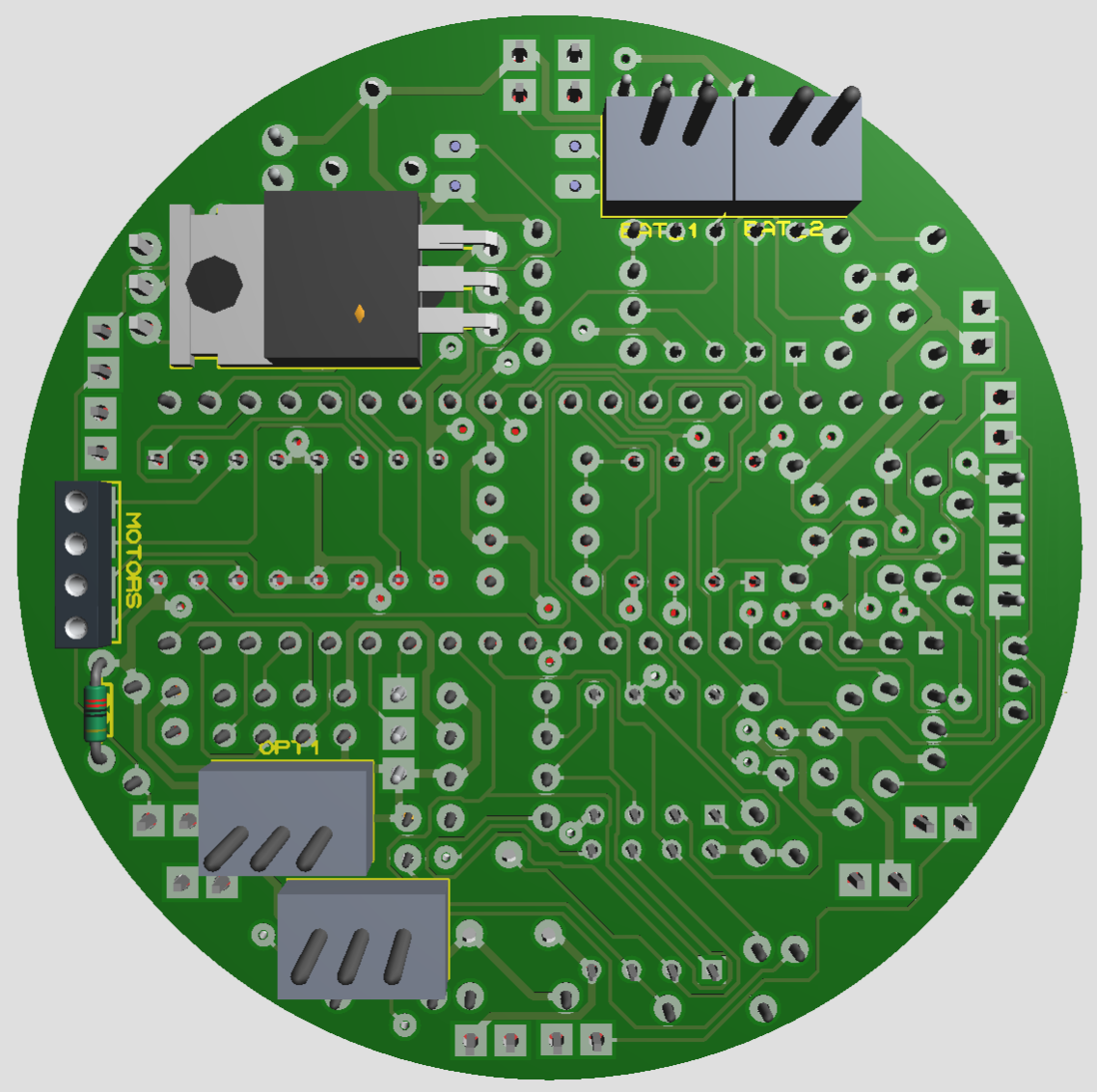
PCB 3D view
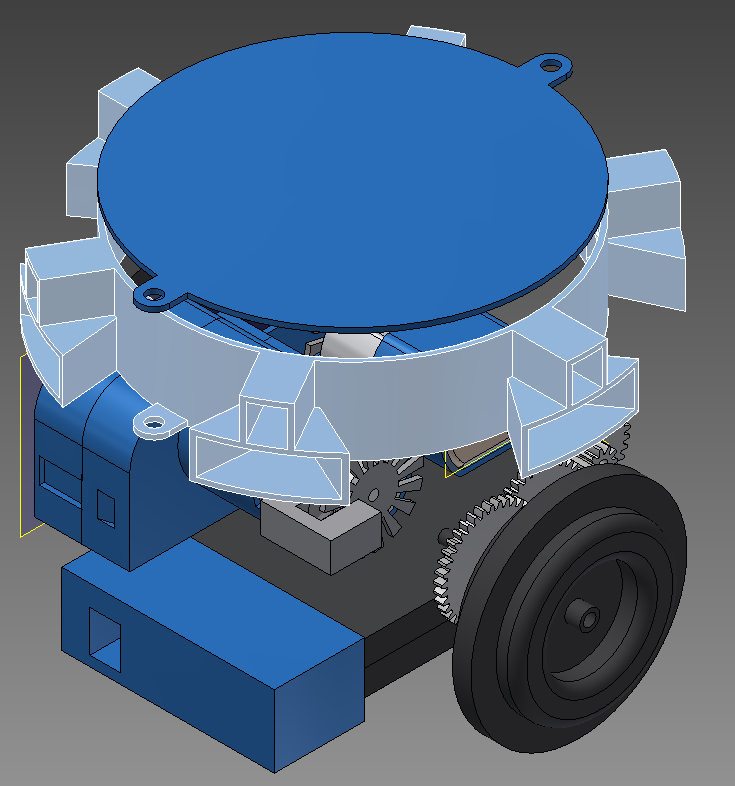
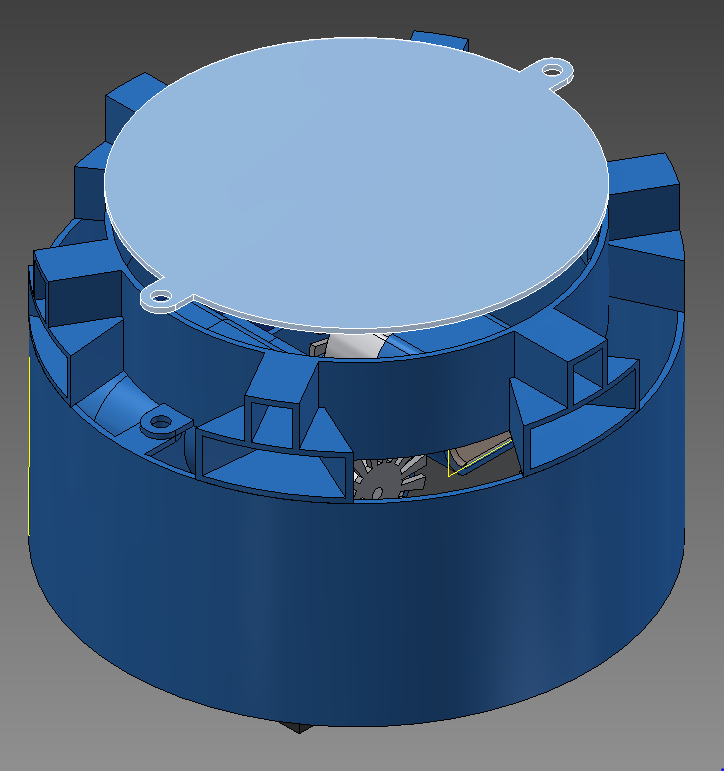
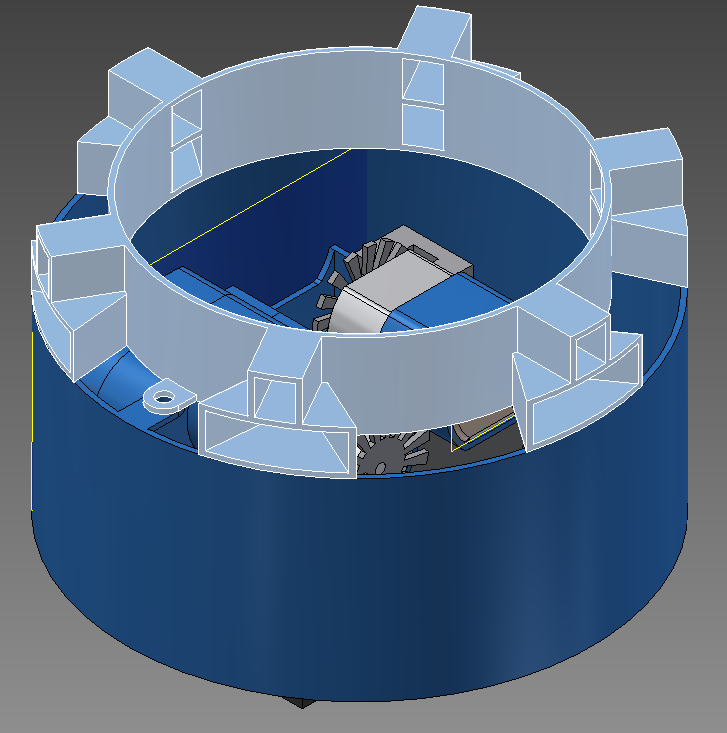
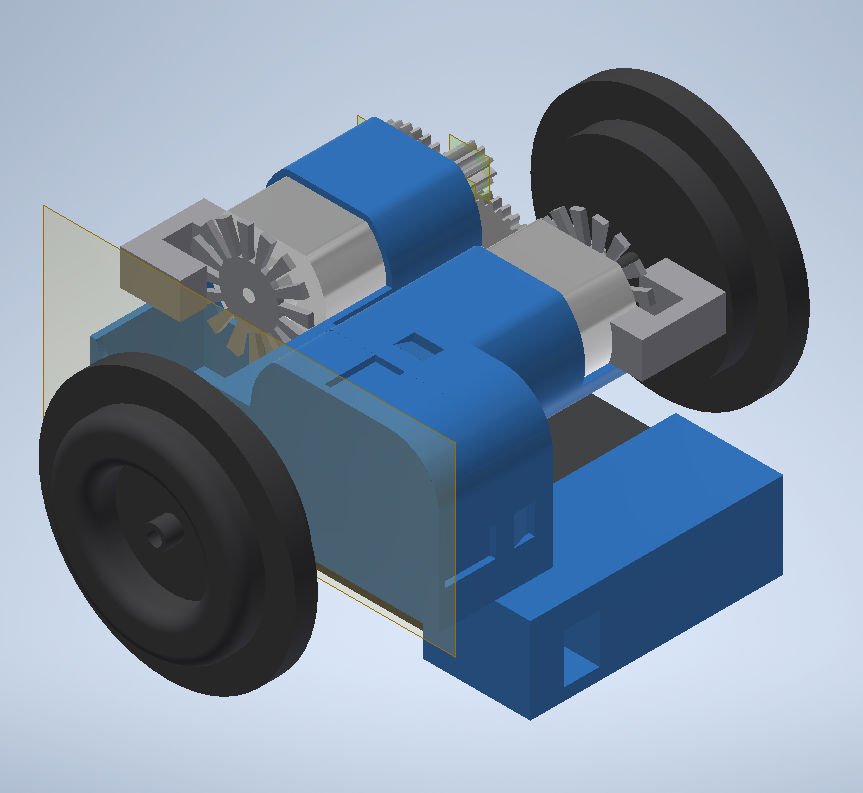
CAD view
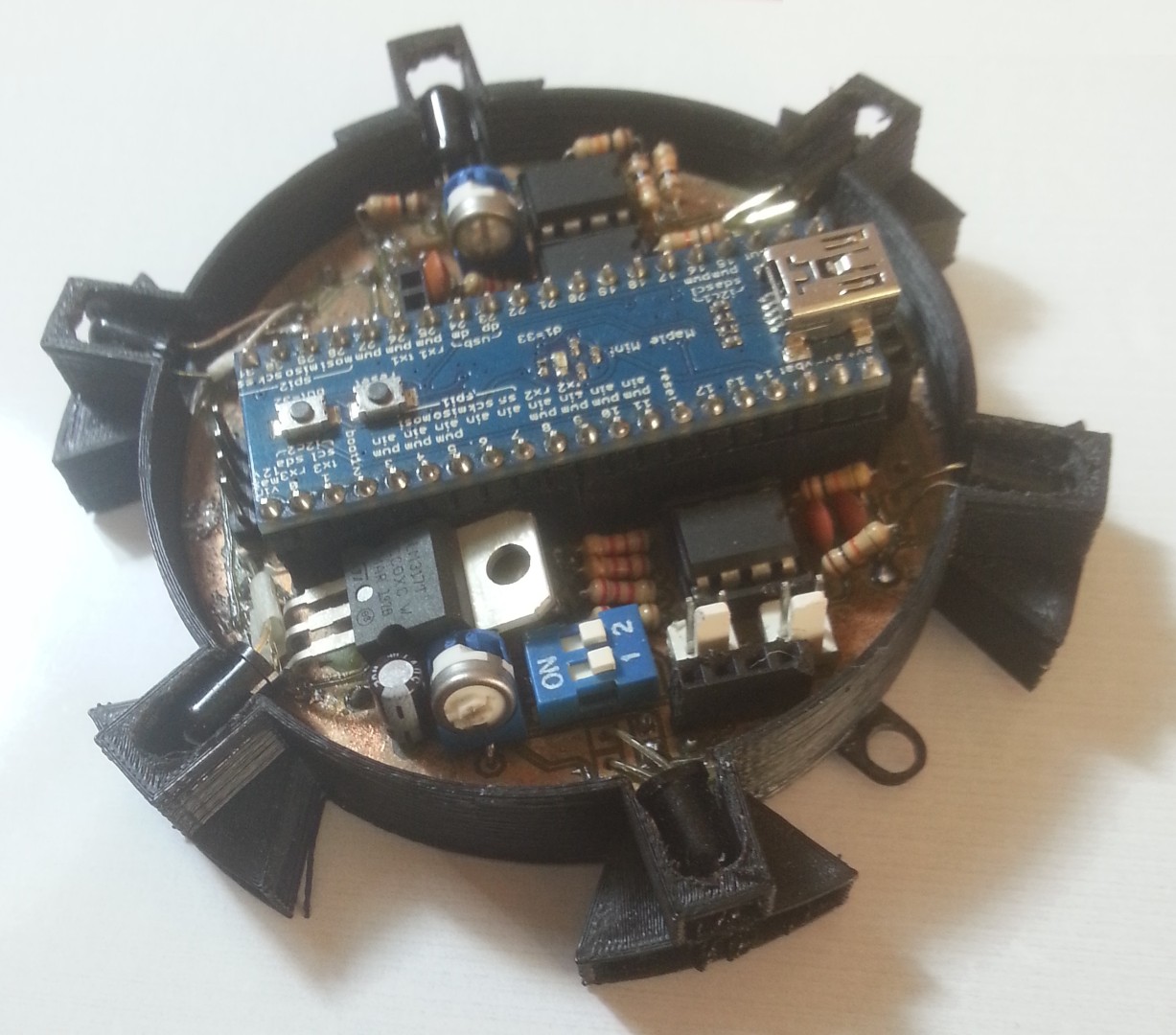
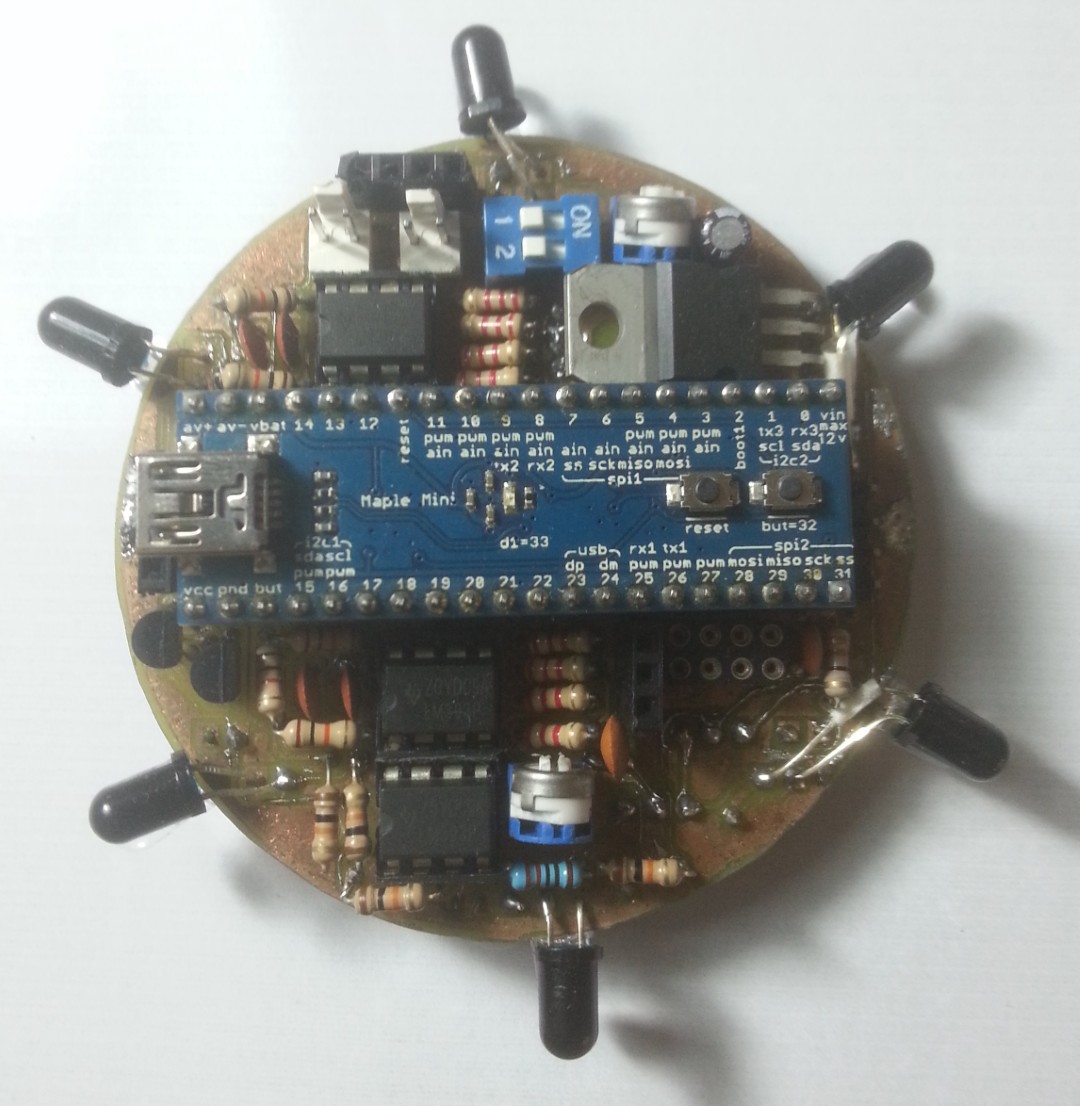
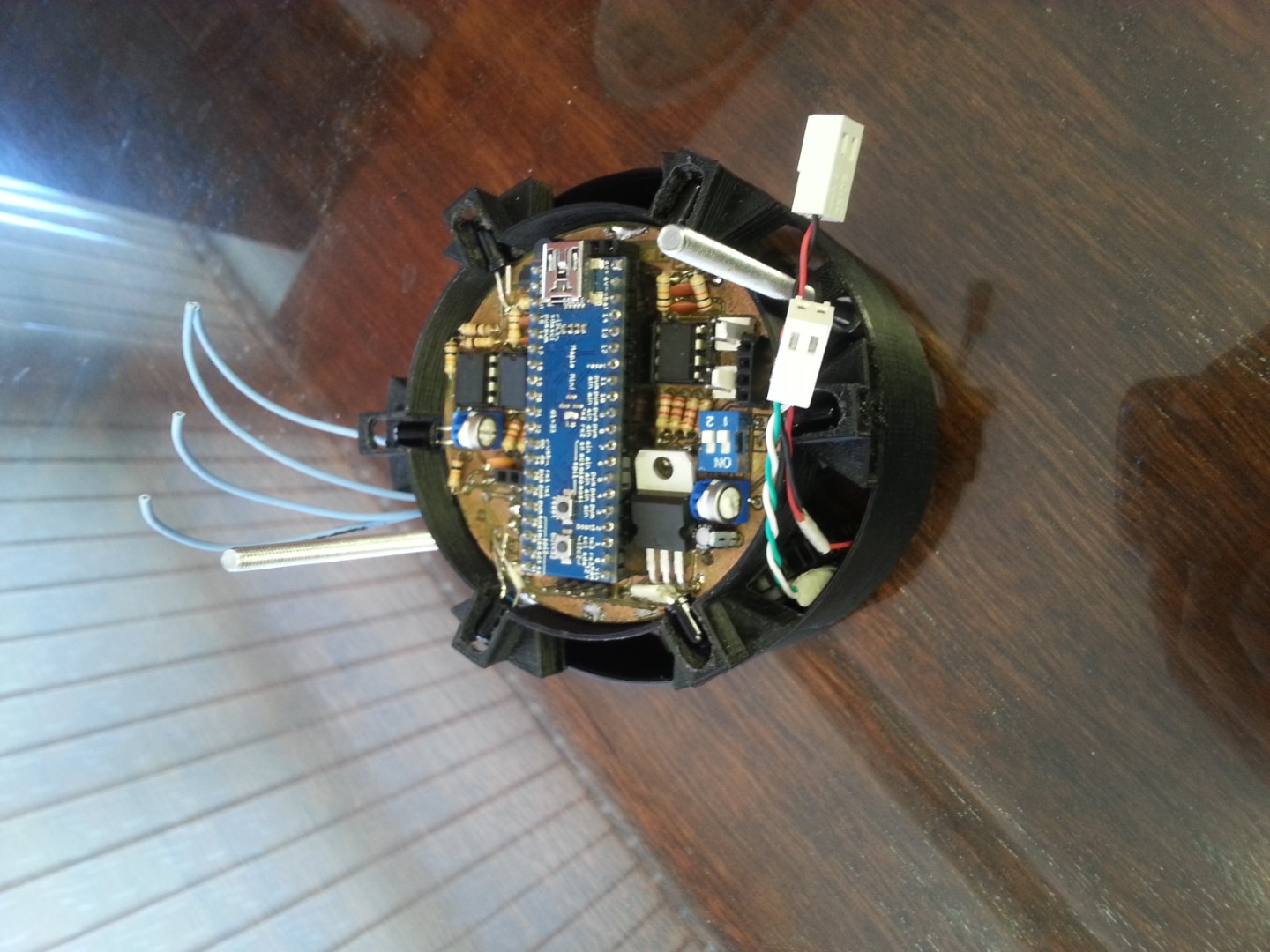
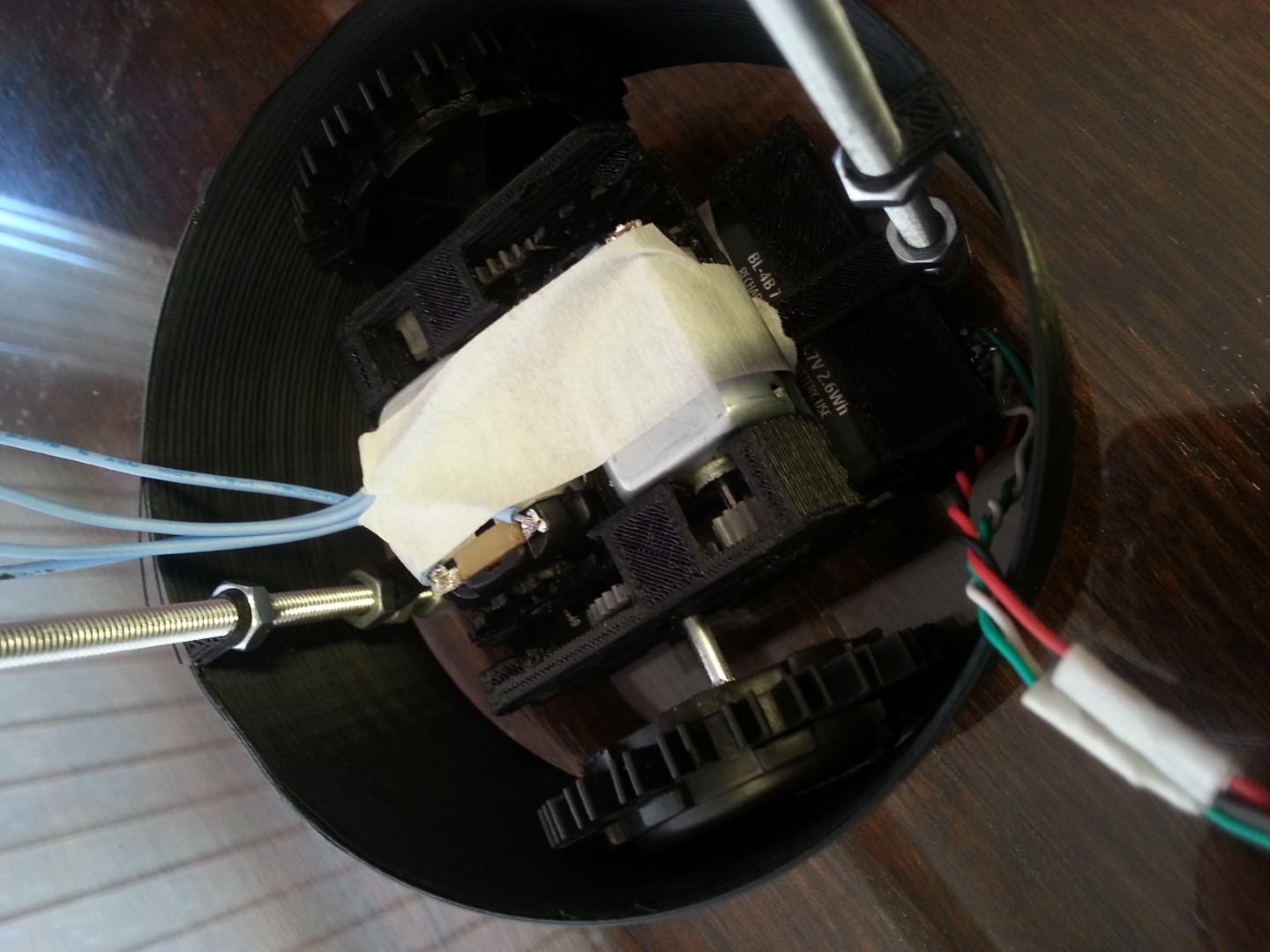
Implementation
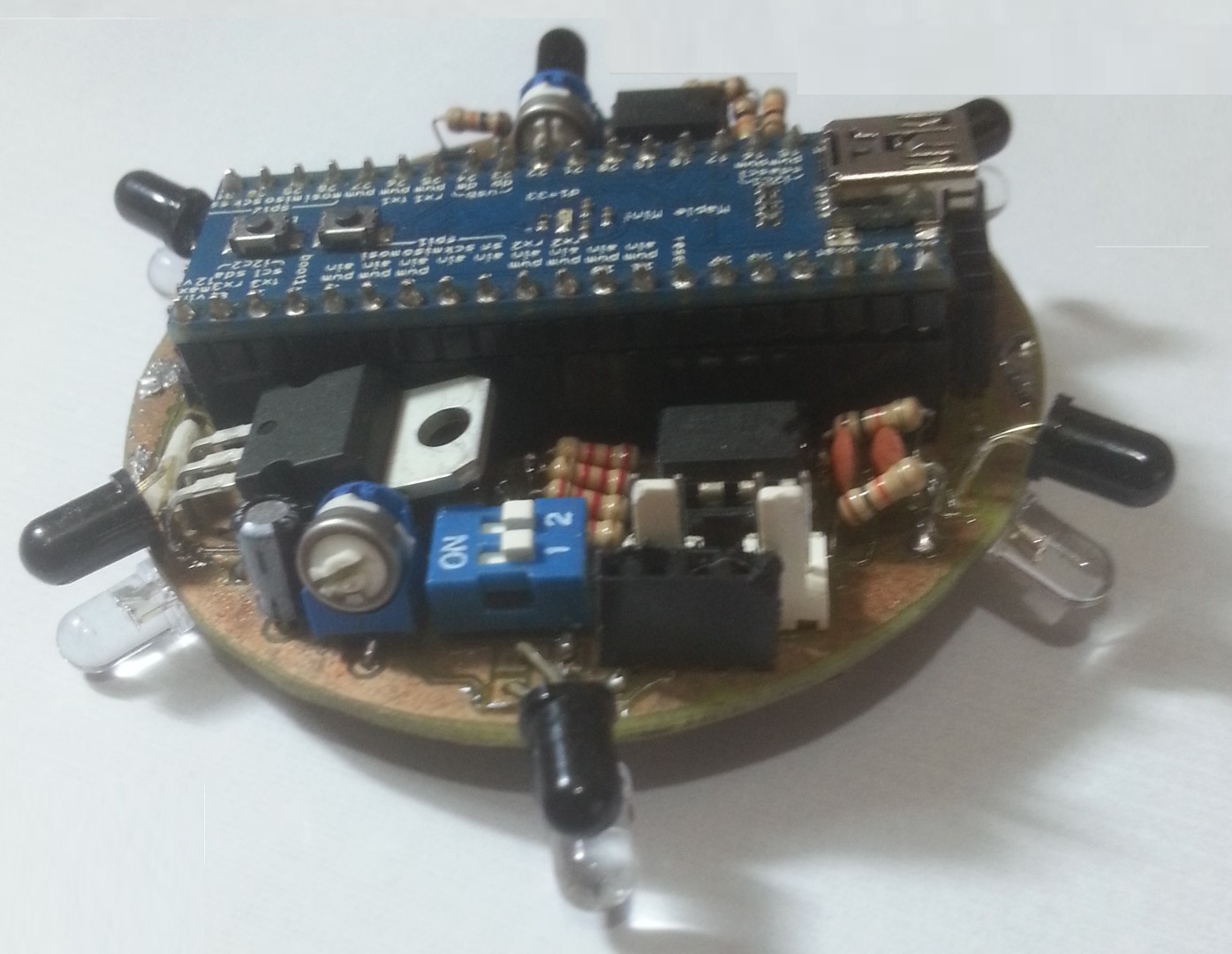
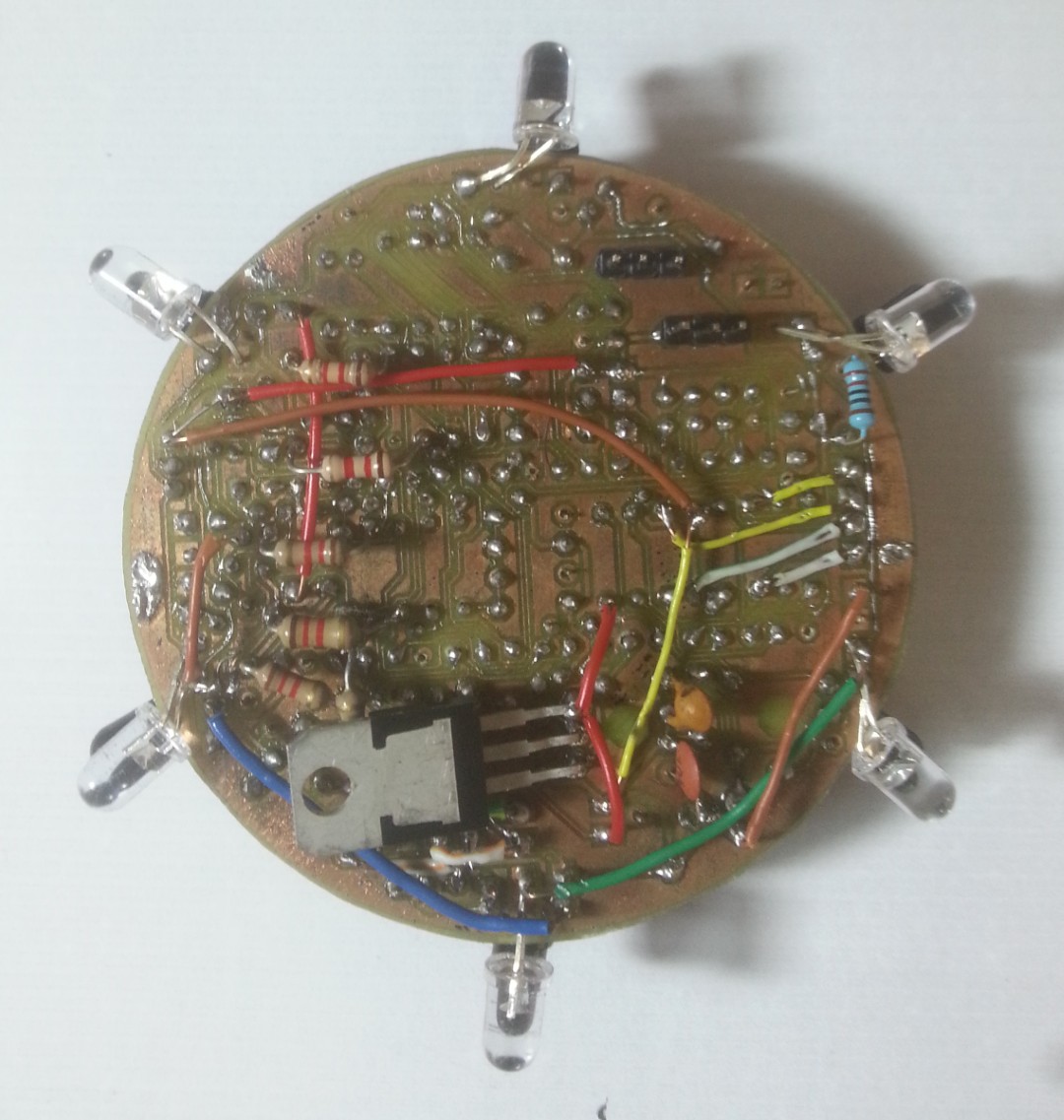



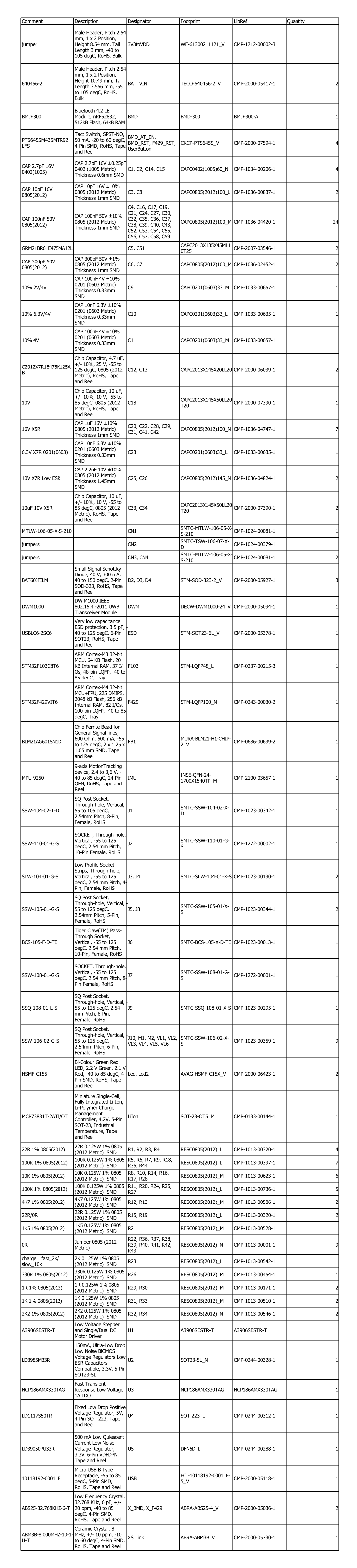
Bill of materials (BOM)
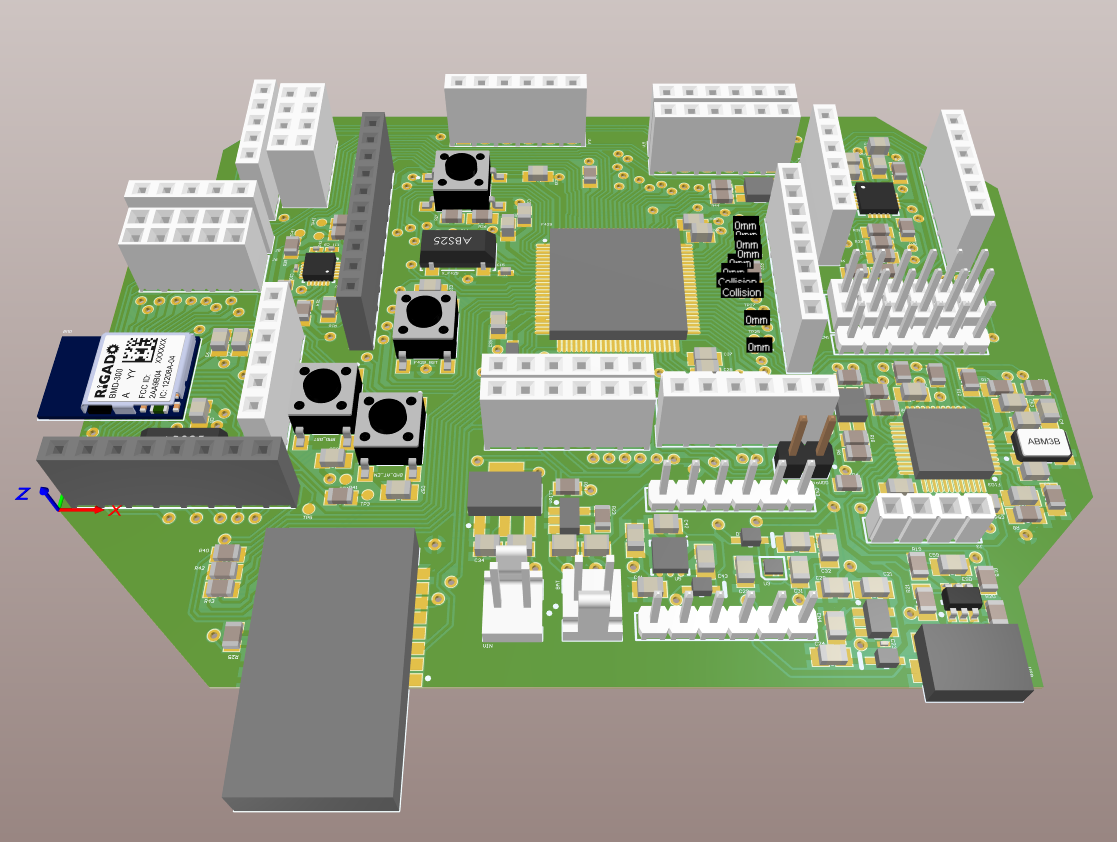
IEA_uRobotics_v2 characteristics
- Schematic and PCB designs made in Altium.
- Designed with SMD components.
- ST-LinkV2 programmer STM32F103C8T6.
- Main uC STM32F429VIT6.
- USB connector + ESD protection.
- 9 Degrees of Freedom (DoF) motion tracking IMU MPU9250 for low-range spatial positioning.
- Dual DC motor driver A3906..
- Li-Ion/Li-Po charger MCP7383.
- Decawave DWM1000 module for mid-range spatial positioning.
- +5V/+3.3V voltage regultor for external power supply and battery: LD3985M33R, MCP186AMX330TAG, LD39050PU33R and LD1117S0TR.
- BMD-300 Bluetooth Low Energy (BLe) module for wirelss communication.
- Six Time of Figth (ToF) VL3501x sensors.
Schematic
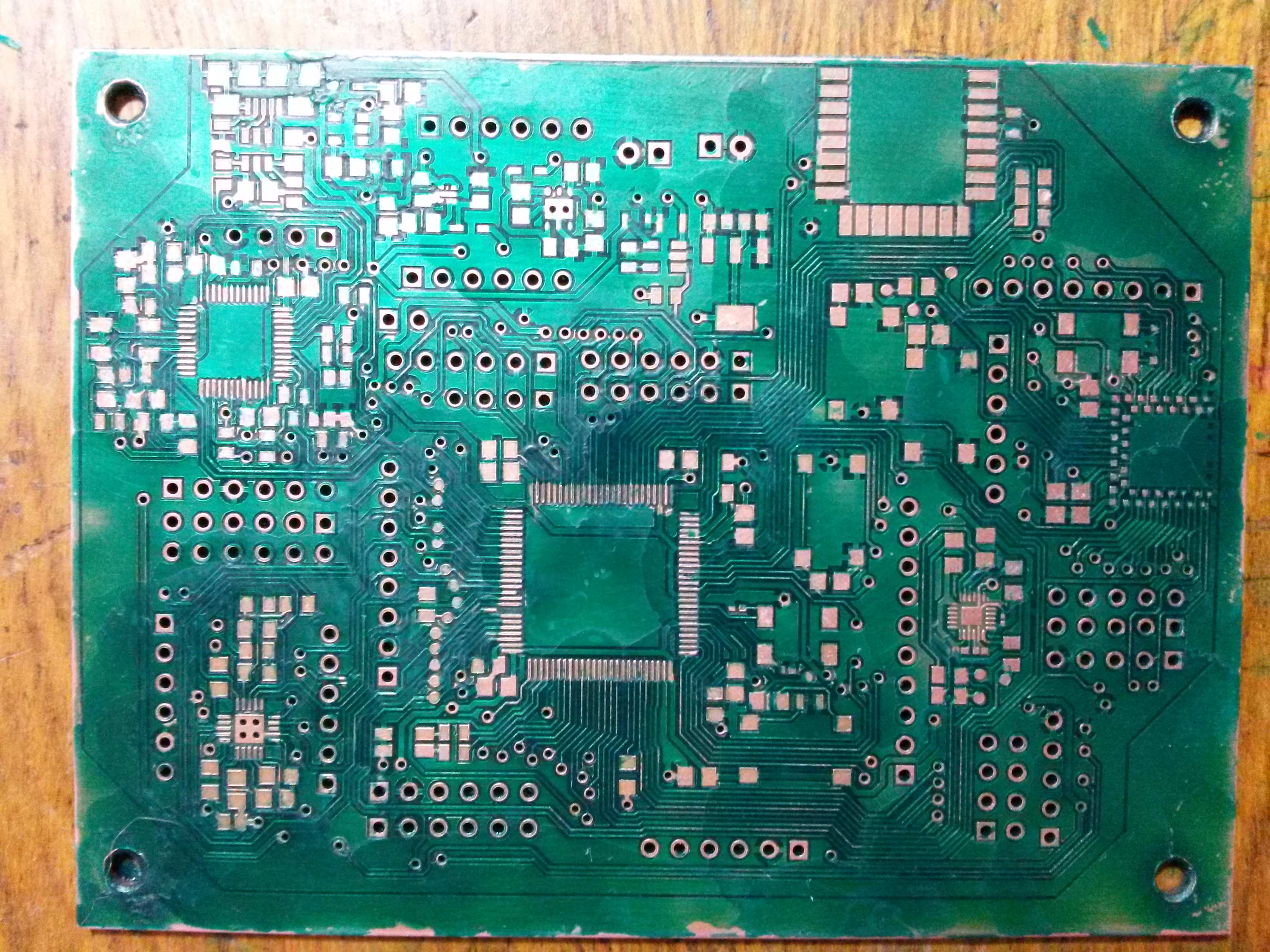
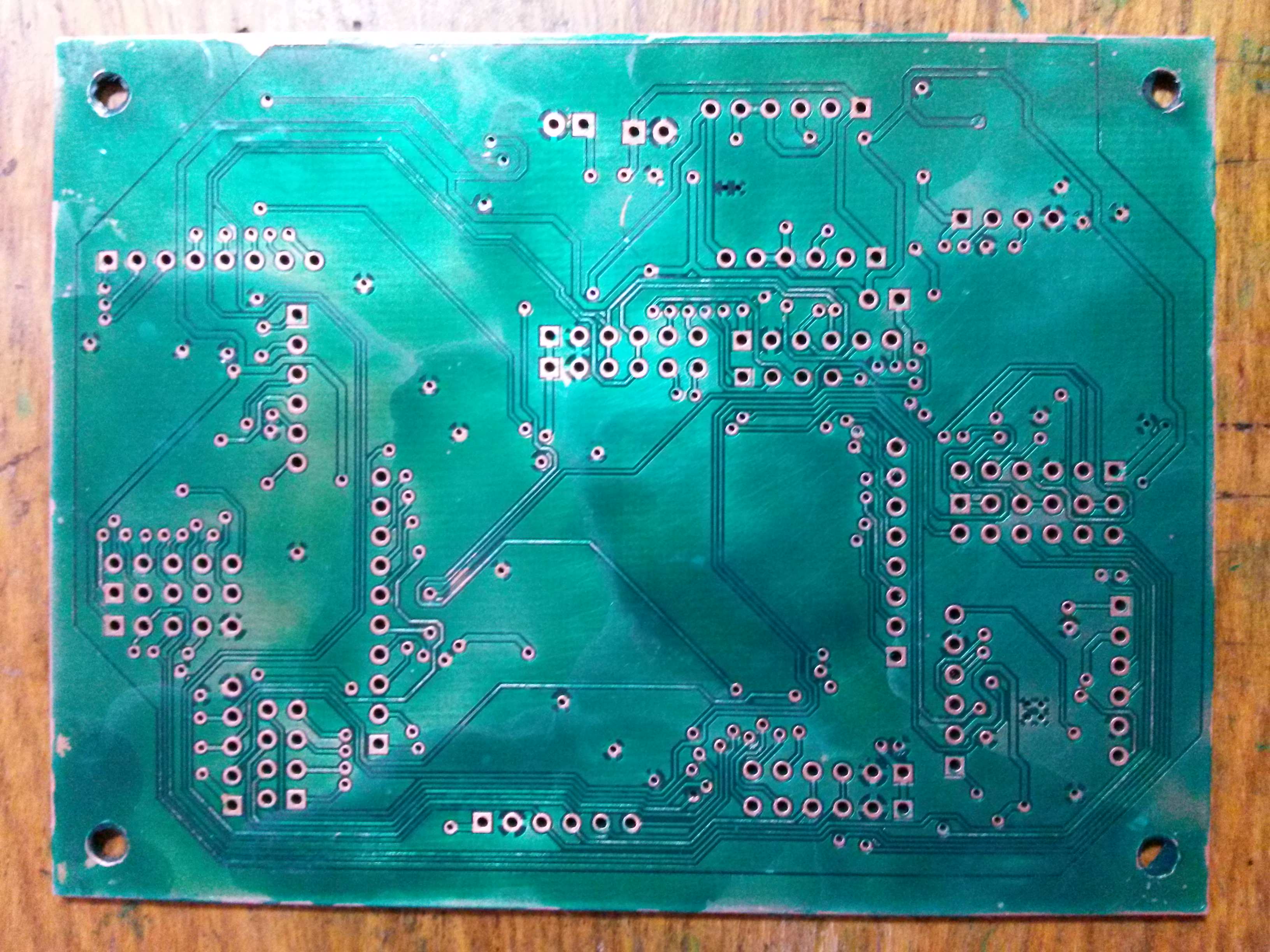
PCB
PCB 3D view
Implementation

Bill of materials (BOM)
Comentarios
Comments powered by Disqus