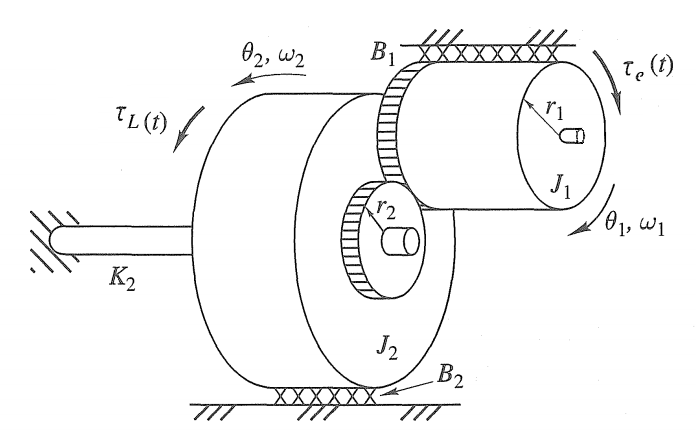
The objective is to model the dynamics of a DC servo motor with gear train, Fig. 1, and to deduce two equilibrium points.
Fig.1 - DC servo motor with gear train.
Free-body diagram analysis
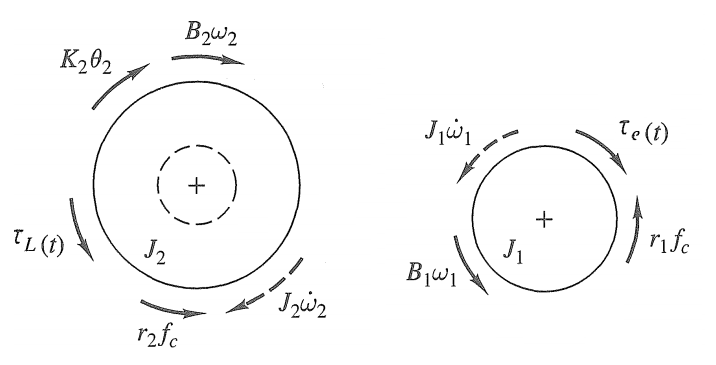
The system can be decomposed in two sections: a rotational mechanical, and an electro-mechanical. The rotational mechanical can be derived as follows
Fig.2 - Rotational mechanical free-body diagram.
where $\theta$ is the angular displacement, $\omega$ is the angular speed, $B$ is the rotational viscous-damping coefficient, $K$ is the stiffness coefficient, $J$ is the moment of inertia, $f_c$ is the contact force between two gears, and $r$ is the gear radius.
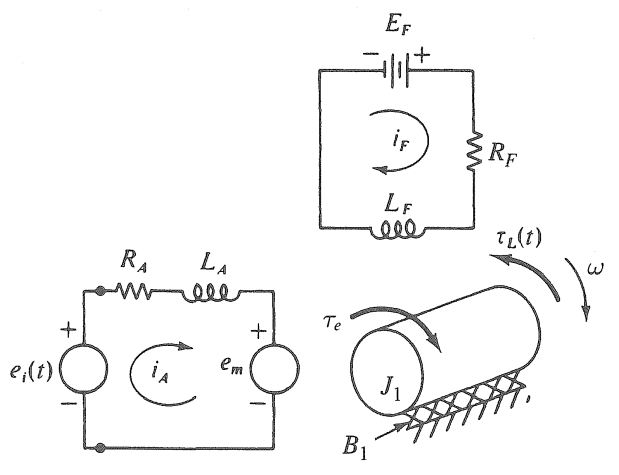
The electromechanical section (DC motor) is
Fig.3 - Electro-mechanical free-body diagram.
where $R_F$ is the field resistance, $L_F$ is the field inductance, $E_F$ is the applied constant field voltage, and $i_F$ is the input field current. $R_A$ is the stationary resistance, $L_A$ is the stationary inductance, and $e_m$ is the induced voltage, $i_A$ is the input stationary current, and $e_i(t)$ is the applied armature voltage, and $\tau_e$ is the electro-mechanical driving torque exerted on the rotor.
where $\phi(i_F)$ is the flux induced by $i_F$, $A$ is the cross-sectional area of the flux path in the air gap between the rotor and stator, $l$ is the total length of the armature conductors within the magnetic field, and $a$ is the radius of the armature.
Also, the voltage induced in the armature $e_m$ can be written as
where $\tau_{all}$ are the torques acting on a body, $K\theta$ is the stiffness torque, $B\omega$ is the viscous-frictional torque, $J\dot{\omega}$ is the inertial torque, $\tau_e(t)$ is the driving torque, $\tau_L(t)$ is the load torque, and $r f_c$ is the contact torque.
Due to the relation between gears,
\begin{align}
\theta_1 & = N \theta_2 \\
\omega_1 & = N \omega_2 \\
\dot{\omega}_1 & = N \dot{\omega}_2 \\
N & = \frac{r_2}{r_1},
\end{align}
where $N$ is the gear radius relation. We solve \eqref{eq:Rot1} and \eqref{eq:Rot2} in terms of $\omega_2$ and $\theta_2$,
where $V_{all}$ are the induced voltages on the rotor and stator, $V_{L_{A}}$ is the stationary resistance voltage, $V_{R_{A}}$ is the stationary inductance voltage.
If $i_F$ is defined as constant, then \eqref{eq:tau_e} is
This equilibrium point indicates that a $\textbf{constant angular displacement (twist)}$ produced by $x_{1_0}=\theta_{2_0}$ is sufficient to balance the constant applied armature voltage $e_i=E_0$. On the other hand, if we solve for no external torque $\tau_L=0$, constant applied armature voltage $e_i=E_0$, and no stiffness $K_2 = 0$. The problem is
which indicates that a $\textbf{constant angular speed}$ produced by $x_{2_0}=\dot{\theta_{2_0}}$ is needed to balance the constant applied armature voltage $e_i=E_0$.
References
[1] Close, Charles M. and Frederick, Dean K. and Newell, Jonathan C., Modeling and Analysis of Dynamic Systems, 2001, ISBN 0471394424.
Comments
Comments powered by Disqus